ロボット配線と戦うエンジニアへ~最適なケーブル管理とは
(出典:Westend61 /stock.adobe.com)
エンジニアは、設計の最終段階まで設計の一部を残さないようアドバイスされることがよくあります。これは確かに賢明なアドバイスですが、残念ながらプロジェクトの現実とはしばしば矛盾します。プロジェクトリストにある作業は、後で実行するか、最後に実行しなければならないものもあり、すべてを設計の初期段階で決定することは不可能なからです。
それでも、詳細を確定できない場合でも、少なくとも初期段階ではこれらの設計上の要素を念頭に置いておくことが重要です。ロボットアセンブリやシステムの電源および信号ケーブルの配線も、その一例です。初期設計段階では、主要な機械的考慮事項、モータの問題、負荷容量、精度および再現性、性能目標、コスト、組み立てに関する懸念、その他の要因が通常、より優先度が高くなります。その兆候の一つは、ロボットの「魅力的な」写真には、ロボットのケーブル配線が写っていないものが多いことです。ケーブル配線は、ロボットの洗練された未来的な外観を損なう可能性があるからです。
とはいえ、何年も前にエンジニアリングのメンターから教わったように、ケーブルアセンブリ(ワイヤとそのコネクタ)は、設計において無害で受動的な存在ではありません。電力や信号を伝送する場合でも、実際には目に見えにくいものの、電気的および機械的な問題の原因となる可能性があります。そのため、設計時には十分な配慮と注意を払って扱う必要があります。
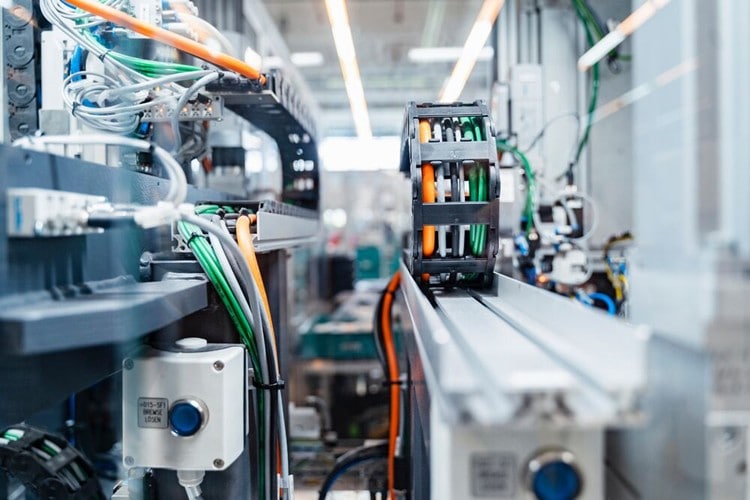
この注意は、基本的な AC または DC 電源ケーブルから、電磁スペクトル全体、RF、さらには光リンクにまで適用されます。また、電源配線と共置されることが多い低レベルセンサおよび制御信号ケーブルにも適用されます(図 1)。さらに、ロボットケーブルにはもう 1 つの課題があります。それは、ねじれたり動いたりできる柔軟性を備えていると同時に、過酷な環境下でも繰り返される屈曲に耐えることができることです。同時に、これらのケーブルは邪魔になったり、絡まったり、故障したりしてはなりません。これらの課題すべてに対応するための設計は、非常に困難な作業です。

図1:ロボットシステムのケーブル配線全体には、モータ用の電源配線、モータ管理、センサ、および接続用の低レベル信号配線が含まれ、各ケーブルの両端には堅牢なコネクタも取り付けられている。(出典:Arbystudio/stock.adobe.com、AI 生成)
ケーブル配線の難易度は、ロボットの機構の種類やサイズによっても影響を受けます。この構造は、医療用バイアルを試験室に入れるために使用される小型の卓上型で機能限定型のユニットから、直交座標軸(X/Y軸)のみの動作が可能な天井吊り式ガントリー、そして人間の腕の動きを模倣した最も柔軟性と動作能力に優れた6軸ユニット(6自由度、または6DoFとも呼ばれる)まで多岐にわたります(図2)。

図2:最も複雑な標準ロボットは、人間の腕の動きを再現した 6 軸ユニットです。6 つの軸にはそれぞれモータが搭載されており、各軸の名称と各軸が作り出す動きが指定されている。[1](出典:natatravel/stock.adobe.com)
モータベースのロボット組立に信頼性の高いケーブル配線を導入することは困難に見えるかもしれませんが、ロボット設計者は、かつてロボットを支配していた油圧駆動ユニットが、現在ではほとんどの場合、電気モータ駆動に取って代わられたことを感謝すべきでしょう。前者は、ホースの配線に多くの問題があり、わずかな漏れやホースの破裂で環境汚染を引き起こし、設置とメンテナンスには電気技師と油圧技術者の両方が必要でした。また、加圧用の外部コンプレッサーも必要でした。電気モータを搭載したロボットが普及したのも当然のことでしょう。
油圧式ロボットの課題は概ね解決され、ロボットのケーブル配線や配置に関する新たな課題が浮上しています。これらの課題は、主に銅ワイヤ、ケーブル保護、ケーブル管理に関するものです。
銅線および銅線束
銅ワイヤの配線では、モータの電力および低レベル信号用に、ワイヤのゲージ、撚り線、およびコネクタを適切に選択する必要があります。電源配線はモータの電圧および電流によって決定されますが、制御信号および通信信号の配線(電流ループ、イーサネットなど)については、非公式のガイドラインおよび公式の規格で定義されています。絶縁性能に関する電気規格もあります。ほとんどのシステムでは、モータのフィードバックセンサ、ビジョンシステム、圧力センサ、ひずみゲージなどからの信号用ワイヤも必要です。
ほとんどの場合、ワイヤアセンブリ全体には、電磁干渉 (EMI) の放出を防ぎ、他のソースからの干渉を最小限に抑えるために、編組シールドが必要です。さらに、束内のケーブルの一部には、業界標準に準拠するために独自のシールドが備わっている場合があります。
シールドの使用はジレンマをもたらします。一方では、シールドがワイヤの絶縁体に繰り返し摩擦することで、長期的には故障の原因となる可能性があります。しかし、この追加のシールド層を排除するという単純な解決策には、2つの新たな問題があります。まず、ロボットシステムは、外部からの EMI および無線周波数干渉 (RFI) に対してより敏感になります。次に、ロボット自体が EMI/RFI の発生源となり、周辺の機器の電子機器や機能に悪影響を及ぼす可能性があります。
双方向干渉の考慮から、シールドのない高屈曲ケーブルの使用が許容されない場合、解決策があります。ベンダーから、シールドが特別に巻かれた特殊ケーブルが標準品として入手可能です。このケーブルでは、捻れは主に、シース、シールド、絶縁体の間のスライドおよびバッファ要素によって吸収されます。
基本的なケーブル保護
電気的要件に基づいて適切な銅導体および絶縁材を選択することに加え、ケーブルアセンブリに関しては多くの機械的問題に対処する必要があります。
-
引張強度:ケーブルが破断することなく引張力に耐える能力です。
-
柔軟性:ケーブルが損傷することなく曲げられる容易さです。
-
耐久性:温度、湿度、化学物質などの環境要因に対するケーブルの耐摩耗性です。
-
耐摩耗性:摩擦による表面摩耗に耐える能力です。
-
耐疲労性:繰り返し曲げや屈曲に耐える能力です。
-
曲げ半径:ケーブルに損傷を与えないで曲げることができる最小の半径です。
-
最大引張張力: 損傷を引き起こすことなく、ケーブルの取り付け時にケーブルに加えることができる最大の力のことです。
-
側壁圧力: 曲げ時にケーブルの側壁にかかる圧力。ケーブルの性能や寿命に影響を与える可能性があります。
-
長期的な摩耗: 高性能ケーブルの寿命には、4 年または 4,000 万回の往復動作など、使用定格が設定されている場合があります。
ケーブル管理保護
ロボット用ケーブルキャリアシステムには、次のような多くの要求があります。[2]
-
ケーブルがスムーズかつ中断なく移動するようにします。
-
不十分な拘束によりケーブルが緩く浮かないようにします。
-
ケーブルが挟まれないように、十分な曲げ半径を確保します。
-
交換や追加のためにケーブルに簡単にアクセスできるようにします。
-
ケーブルの絶縁体、ハウジング、およびコネクタを、有害な環境条件(粉塵、汚染物質、さらには煙)から保護するための、完全密閉型(密閉型ではない場合)のハウジングをご用意ください。
エンジニアは、6軸ロボットにおけるケーブルの誘導および保護のために複数のソリューションを用意しています。ここでは、よく知られている3つのソリューション、すなわちフレキシブルチューブ、密閉型ドレスパック、およびロボットケーブルキャリアシステムに焦点を当てます。
フレキシブルチューブ
波形または柔軟なチューブは、通常、ポリウレタン(PU)またはポリアミド(PA)で製造されており、接続部の耐引裂性に優れ、長寿命を実現します(図 3)。その欠点は、ケーブルの動きに抵抗し、ケーブルの両端でしか固定できないことです。さらに、その弾力性により、被覆ケーブルに追加の伸びやねじれ応力が加わります。

図3:編組ケーブルハウジングは、さまざまなケーブルタイプに対応しながらケーブル束を保護する基本的な方法。(出典:Chepko Danil/stock.adobe.com)
エンクローズドドレスパック
ケーブルを「ドレスパック」に収納することで、ケーブルを内蔵した波形プラスチックチューブを使用して、ロボットに直接取り付けることができます(図 4)。また、欠点もあります。ケーブルのメンテナンスが、完全に密閉された非モジュール式の筐体のため困難です。そのため、モジュール式設計の場合、1つの部品が故障しただけで、アセンブリ全体を交換する必要があります。
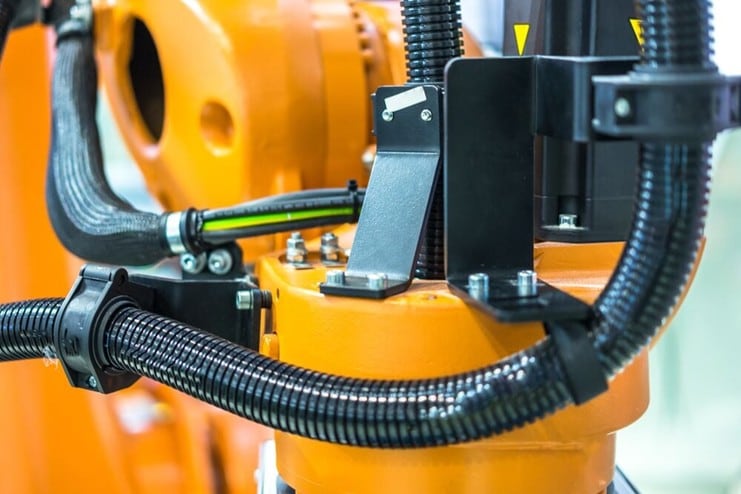
図4:より高度な保護手段としては、波形のプラスチックチューブを別のハウジングとして使用するケーブルドレスパックがある。(出典:THINK b/stock.adobe.com)
ケーブルキャリアシステム
より優れたソリューションは、必要に応じて個々の部品を交換できるもので、モジュラーボール&ソケットリンクに基づくキャリアシステムがこのアプローチに対応しています。追加の重要なメリットとして、このソリューションではケーブルの最小曲げ半径制限が維持されます。キャリアシステムが短すぎる、または長すぎる場合、あるいはロボットが別の用途に再配置される場合にも、リンクの追加や削除は簡単です(図 5)。
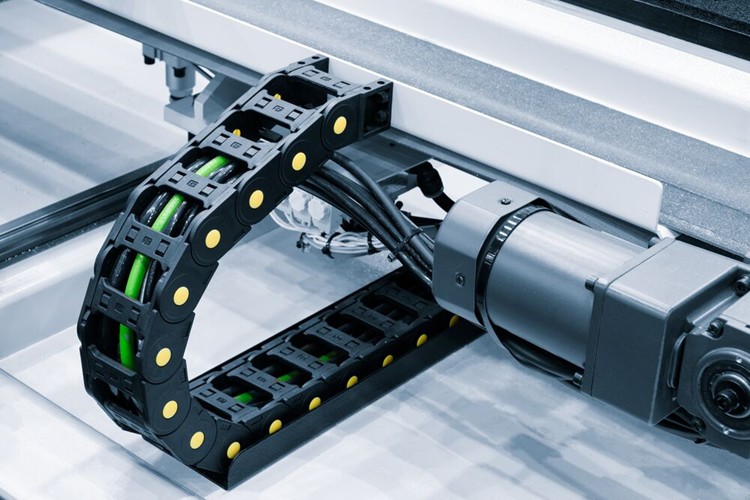
図5:キャリアシステムは、これまでの方式よりも複雑ですが、個別修理などの機能や利点とともに、保護機能が強化されている。(出典:Aleksandr Matveev/stock.adobe.com)
ケーブル管理ルーティング
ケーブルの配線方法と固定方法も重要な決定事項です。結局のところ、ハリウッドのセレブに専属のスタイリストがいるのですから、人間のような多軸ロボットの設備にもそれが必要ではないでしょうか?ストレスの多い環境で動作する高性能ロボットで「衣装のトラブル」が発生しては困ります。
設置業者や技術者が、追加のドレスパック、ケーブルタイ、ダクトテープを追加して絡まりや干渉の可能性を最小限に抑えようとする姿勢は称賛に値しますが、こうした善意の努力は実際には逆効果になる場合があります。その理由は、これらが「コルク栓抜き現象」を引き起こし、動作不良につながるからです。
より良いアプローチは、6軸ロボットを、それぞれ特定の位置と軸数を持つ3つの主要部分、すなわち6軸目から3軸目、3軸目から2軸目、2軸目から1軸目に分けて、ケーブル管理を「分割して征服」することです[3](図6)。
ケーブル管理製品ベンダーは、これらの各分野におけるケーブルの管理、拘束、および張力緩和の実施に関する、経験とベストプラクティスに基づくガイドラインを提供しています。さらに、ケーブル管理のためのこれらのアイデアを実装するための業界標準および独自開発の製品も存在します。

図6:6 軸ユニットのロボットケーブルを詳しく調べると、各セクションごとにケーブル管理を個別に検討する必要があることがわかる。 (出典:Four888/stock.adobe.com、AI 生成)
まとめ
ケーブルとその設置は、ありふれた日常的な作業のように思われるかもしれませんが、ロボットシステム、特に多軸システムではそうではありません。ワイヤ、シールド、絶縁、設置について考慮すべき点があります。ロボット用ケーブルおよびケーブル管理製品のベンダーは、これらの設置の固有の特性に合わせた特殊製品を提供しており、エンジニアが高額で不要なミスを回避するのに役立ちます。
出典
[1]https://www.robot-store.co.uk/six-axis-robots
[2]https://www.roboticstomorrow.com/article/2014/02/the-less-is-more-approach-to-robotic-cable-management/236
[3]https://www.igus.com/robot-dress-pack/robot-cable-management-solutions