ソフトウェア・デファインド・ビークル:「最先端」とADおよびADASコンピューティングシステムにおける課題
自動運転(AD)や先進運転支援システム(ADAS)などの自動車業界におけるメガトレンドは、設計者に従来の電子制御ユニット(ECU)[1] からドメイン制御ユニット(DCU)[2] への転換を迫っており、さらに、セントラル通信ユニット(CCU)やゾーン制御ユニット(ZCU)の採用を加速させています。[3] McKinsey Center for Future Mobility(マッキンゼー未来モビリティセンター)によると、 [4] ゾーンコンピューティングを使用した次世代の電気/電子(E/E)アーキテクチャが開始され、2023年から2030年の年平均成長率(CAGR)は約44~45%になると予想されています。DCUの使用量は、同じ期間に4,400万米ドルの価値に増加します(図1)。
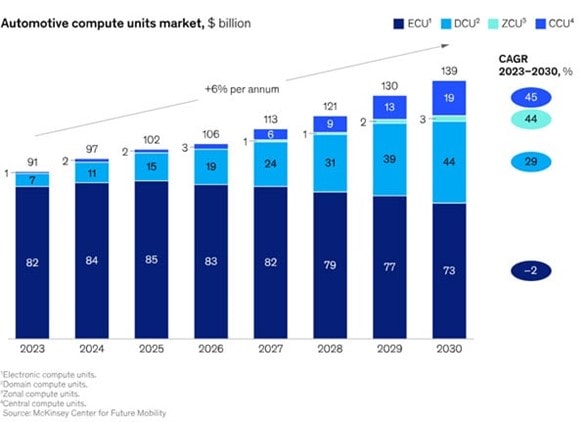
図1:自動車用コンピューティングユニット市場(百万米ドル)(出典:McKinsey Center for Future Mobility)
各機能システムに制御ユニットを割り当てる典型的なドメインベースの電気アーキテクチャは、ゾーンアプローチに取って代わられつつあります。[5] この進化は、基本的に次の4つの要因によって推進されています:
-
OTA(無線)アップデートの円滑化: 多数のECUはアップデートのボトルネックや複雑化を引き起こし、安全性、信頼性、および規制順守の課題につながる可能性があります。ドメインまたはゾーンアーキテクチャによる統合は、大幅な前進であり、更新に失敗した場合のロールバックも容易になります。
-
モジュール式およびコラボレーション用ハードウェアおよびソフトウェア: モジュール式およびコラボレーション用ハードウェアおよびソフトウェアは、開発期間の短縮につながる可能性があります。彼らは、より迅速なリエンジニアリングを可能にし、市場投入までの時間を短縮しています。
-
シリコンの統合とインテグレーションの増加: ゾーンコントローラは、複数のECUの機能を統合することで、シリコンの統合とインテグレーションを実現します。一方、ノードサイズを小さくすると電力効率が向上します。新しく登場した「システムオンチップ」(SoC)設計では、複数の中央処理装置(CPU)、メモリ、および専用ハードウェア(HW)アクセラレータサブシステムが統合されています。当然のことながら、ゾーンコントローラ用の最新SoCは、16ナノメートル(nm)以下のノードサイズに基づいているということです。
-
ワイヤーハーネスの複雑性の低減: ゾーンコントローラが入力/出力(I/O)の集約装置として機能し、多くの場合、車の機械構造に配置されるため、より複雑性の低いワイヤーハーネスが可能になり、標準化の促進、生産工程の自動化のサポート、従業員のスキル要件の低減によるコスト削減が可能になります。最新の自動車におけるワイヤリングハーネスのコストは、E/Eアーキテクチャ予算の20%を占めることが多く、これは大きな利点となります。
近年、電気自動車の自律走行の開発は、研究者や技術者の間で大きな注目を集めています。[6] 多くの変化が自動車の電子アーキテクチャに革命をもたらし、自律走行とその関連課題につながっています。自律走行車は、環境を感知し、人間の介入なしに安全に走行できるものでなければなりません。[7] 米国運輸省道路交通安全局(NHTSA)は、自動化の度合いを5段階に分類しています。[8] 自動化なしから完全自動化まであります。
自律性の高いレベルでは、車両はLiDAR、カメラ、GPSなど複数のセンサを使用して周囲を感知する必要があります。センサ入力に基づいて、車両はリアルタイムで自己位置を特定し、判断を下し、運転操作を行わなければなりません。このセンサは運転の安全性を高めることを目的としており、 センシングと呼ばれています。一方、センシングからのデータ処理、意思決定、アクチュエータ(ブレーキ、ステアリングなど)への指令を行うADシステムの能力は、 表1 および 図2に示されているように、 コグニティブと名付けられています。
表1:より高い自治レベルにおける情報収集と意思決定の高度な段階。(出典:マウザー・エレクトロニクス)

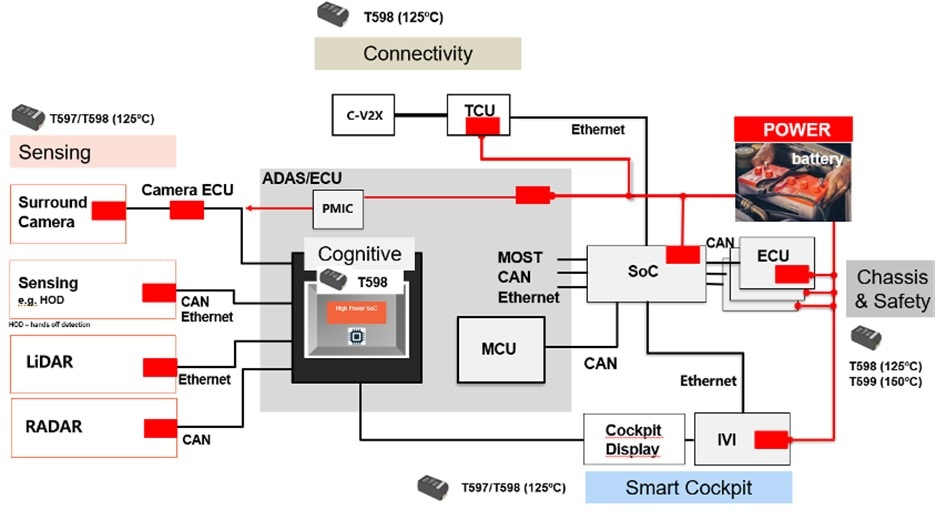
図2:ポリマーコンデンサを用いた自動車搭載戦略(出典:YAGEO Group企業であるKEMET Electronics)
ADのコンピューティングシステムは、計算、通信、ストレージ、セキュリティ/プライバシー、および電力管理に分類できる。[9]
自律性を高めるための継続的な取り組みは、ADのコンピューティングシステムの能力を大幅に強化します。Liangkai氏と共同研究者らによると、[9] 現在、ADのための「最先端」のコンピューティングシステムには、7つのパフォーマンス指標、9つの主要技術、11の未解決課題が含まれています。
自動運転のレベルが上がるにつれ、周囲の環境データを取得するために搭載するセンサの数も増やさなければなりません。センサの数が増加すると、SoCで処理されるデータ量も増加し、データ処理を行うメイン半導体デバイスの消費電力も増加します。この進化により、認知能力の「脳」の能力を最適化するために消費電力が増大し、知覚と意思決定が向上します。
DCUの内部回路には次のものが含まれます:
-
センシングECUと通信するトランシーバ回路
-
データを処理し、意思決定を行うSoC
-
様々なメモリ(DDR/Flash)
-
SoCで評価した情報に基づいて運転を制御するマイクロコントローラMCU
-
さまざまな機能を異なる電圧レール(1V未満、3.3V、5Vなど)で動作させるDC/DCコンバータ電源回路
DCU/ZCU/CCUに搭載される低電圧SoC(1V以下)は、通常25A以上であり、高電流、低損失、小型化、高周波数動作、高精度(電圧)に対応できる部品が必要となります。
DC/DCコンバータでは、入力ノイズの低減と出力の平滑化/デカップリングに、 T598ポリマーコンデンサ を使用するのが一般的です。一般的には、入力には T598D476M025ATE060 (EIA 7343-31 47uF25V、60mOhm)が採用され、出力平滑/デカップリングには、 T598D477M2R5ATE006 (EIA 7343-31 470uF2,5V, 6mOhm)が採用されました。将来のニーズをさらに先取りするため、KEMETでは現在、次世代の入力ノイズ低減用プロトタイプサンプルを用意しています。容量拡張用の T598D107M025ATE050 (EIA 7343-31 100uF25V、 50mOhm)は静電容量の拡張用、 T598D687M2R5ATE006 (EIA 7343-31 680uF2,5V、6mOhm)は最適な出力平滑用です。
処理データと動作の増加をサポートするための消費電力の需要増加は、T598シリーズの主な利点である高静電容量と低静電容量の周波数ロールオフ、温度安定性、低ESR、高リップル性能、長寿命性能を今後も必要とし続けるでしょう。
まとめ
自動車業界が自律性の高いレベルに向かって進化を続ける中、T598シリーズのようなタンタルポリマーコンデンサの信頼性と性能は、これらの高度なシステムの安全性、効率性、耐久性を確保する上で極めて重要となります。低ESR、高静電容量、そして幅広い温度および周波数にわたる優れた安定性により、先進的な自動運転システムにおける電力消費とデータ処理の増加に対応するのに最適です。
「ソフトウェア・ディファインド・ビークルにおける『最先端』とADおよびADAS コンピューティング・システムにおける課題」 ブログは、YAGEO Group企業であるKEMET ElectronicsのCristina Mota-Caetano氏によって執筆されたもので、許可を得て転載しています。
出典
[1]https://en.wikipedia.org/wiki/Electronic_control_unit
[2]https://autotech.news/autonomous-driving-and-cockpit-domain-control-unit/
[3]https://www.continental-automotive.com/en/solutions/server-zone-architecture/zone-control-units.html
[4]https://www.mckinsey.com/industries/semiconductors/our-insights/getting-ready-for-next-generation-ee-architecture-with-zonal-compute#/
[5]https://www.eetasia.com/the-role-of-centralized-storage-in-the-emerging-zonal-automotive-architecture/
[6] Overview analysis of recent development of Self-Driving Electric Vehicles,” Qasim Ajao and Landre Saqeeq, Georgia Southern University.
[7] “CAAD: Computer Architecture for Autonomous Driving,” Shaoshan Liu, Jie Tang, Zhe Zhang, and Jean-Luc Gaudiot, IEEE.
[8] Policy of Automated Vehicles, NHTSA
[9] “Computing Systems for Autonomous Driving: State-of-the-art and Challenges,” Liangkai Liu et al.